The Medium Robot Platform is suitable for advanced research and development in light offroad terrain. At the same time, loads up to several times its own weight can be carried and transported over slight uneven surfaces. The slightly larger footprint compared to smaller platform variants also tolerates slightly higher additional constructions.



ROS prepared: The basis for controlling the platform is an Arduino Mega, which can be connected via the serial interface. Additional modules such as an NVIDIA Jetson Nano or a Raspberry Pi control the platform via ROS (Robot Operating System).
Remote Controllable: The platform is ready for immediate use and can be controlled by means of the supplied remote control. This makes it easy to test the driving characteristics, carry out camera movements or record measured values. Simple equipment can also be controlled remotely via the receiver.
Maker Ready: The aluminum profiles used allow easy expansion with attachments and also larger additional constructions. Due to the low center of gravity of the engines, medium loads can be attached without concerns.
Adaptable and Sustainable: Professional aluminum profiles are used for the chassis. If necessary, the chassis can be adapted to individual requirements without having to be completely redeveloped. In this way, materials are consciously reused. The internal space allows the integration of about two Raspberry Pi’s in the chassis itself. Additional components can easily be mounted on top in separate enclosures.
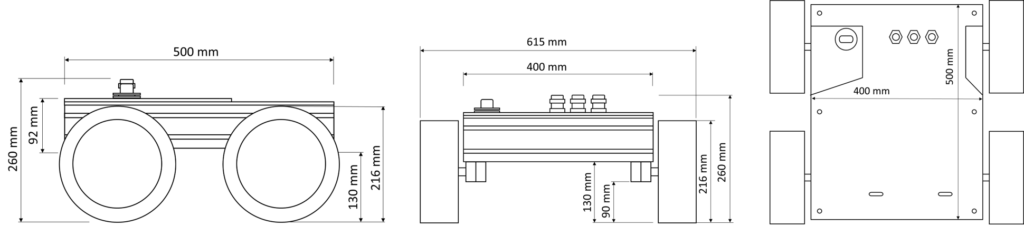
Technical Specifications
| Parameters | |
|---|---|
| Width x Height x Length (over all) | 615 x 260 x 520 mm (24.2 x 10.2 x 20.5 in) |
| Width x Height x Length (main body) | 400 x 92 x 500 mm (15.7 x 3.6 x 19.7 in) |
| Weight | 30 kg (66 lb) |
| Maximum Load | 80 kg (176 lb) |
| Internal Space for Extensions | about 2x Raspberry Pi |
| Dynamics | |
|---|---|
| Maximum Speed | 8 km/h (5 mph) |
| Operating Time (mixed usage profile) | 6 hours |
| RC Interface | Standard PPM Receiver |
| Developer Interface | Arduino Mega |