Die Compact Robot Platform ermöglicht den Einstieg in die Forschung und Entwicklung mit UGVs. Trotz der kompakten Bauweise können Lasten bis zu einem Mehrfachen des Eigengewichts transportiert werden. So können auch schwergewichtige Messgeräte oder Werkzeuge transportiert werden.



Vorbereitet für ROS: Die Basis für die Steuerung der Plattform ist ein Arduino Mega, der über die serielle Schnittstelle angeschlossen werden kann. Zusätzliche, optionale Module wie ein NVIDIA Jetson Nano oder ein Raspberry Pi steuern die Plattform über ROS (Robot Operating System).
Fernsteuerbar: Das UGV ist sofort einsatzbereit. Es kann durch eine mitgelieferte Fernsteuerung über mehrere hundert Meter gesteuert werden. Fernerkundung mit Kameras oder das Aufzeichnen von Messwerten mit transportablen Messgeräten an entfernten Orten ist somit ohne zusätzliche Entwicklungsarbeiten möglich. Einfache Geräte können auch über den Fernsteuerempfänger bedient werden.
Für Maker ideal: Die verwendeten Aluminiumprofile erlauben eine einfache Erweiterung mit Anbauteilen und auch größeren Zusatzkonstruktionen. Durch den niedrigen Schwerpunkt der Motoren können auch mittlere Lasten bedenkenlos angebracht werden.
Anpassungsfähig und nachhaltig: Für das Fahrgestell werden standardisierte Aluminiumprofile verwendet. Bei Bedarf kann das Chassis an individuelle Anforderungen angepasst werden, ohne dass es komplett neu entwickelt werden muss. Auf diese Weise werden Materialien bewusst wiederverwendet. Der Innenraum erlaubt die Integration von etwa einem Raspberry Pi Zero im Gehäuse selbst. Weitere Komponenten können problemlos in separaten Gehäusen aufgesetzt werden.
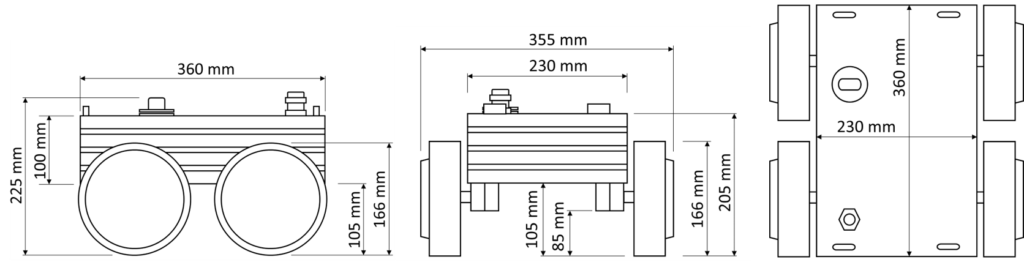
Technische Spezifikation
| Parameter | |
|---|---|
| Breite x Höhe x Länge (über alles) | 355 x 255 x 360 mm (14 x 10 x 14.2 in) |
| Breite x Höhe x Länge (Gehäuse) | 230 x 110 x 360 mm (9.1 x 4.3 x 14.2 in) |
| Gewicht | 13 kg (29 lb) |
| Zuladung Nutzlast | 80 kg (176 lb) |
| verfügbarer Bauraum für interne Erweiterungen | ca. 1x Raspberry Pi Zero |
| Dynamische Eigenschaften | |
|---|---|
| Maximale Geschwindigkeit | 8 km/h (5 mph) |
| Betriebsdauer (Mischbetrieb) | 4 hours |
| RC Schnittstelle | Standard PPM Empfänger |
| Entwicklerschnittstelle | Arduino Mega |